System Verilog : Disable Fork & Wait Fork
To model concurrent and serial behavior, disable fork and wait fork will be used along with fork join constructs. These constructs allow one process to terminate or wait for the completion of other processes.
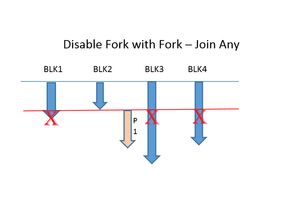
If you want to model your verification environment in such a way that, it has to spawn concurrent processes which will be waiting for events. And as soon as one event is received, terminate the other outstanding processes to go ahead with your next process. In this case disable fork would be the best option along with join_any.
Disable Fork :
class fork_join_class; task run(input event ev_blk1,ev_blk4); fork BLK1: begin # 2ns $display( "BLOCK 1\n" ); # 10ns; ->ev_blk1; end BLK2: begin $display( "BLOCK 2\n" ); end BLK3: begin @ev_blk4; $display( "BLOCK 3\n" ); end BLK4: begin @ev_blk1 $display( "BLOCK 4\n" ); ->ev_blk4; end join_any disable fork; endtask endclass
program myprog; event ev_blk1,ev_blk4; fork_join_class c1 = new;
initial begin c1.run(ev_blk1,ev_blk4); P1: begin $display("Parent Process Started\n"); end #100ns; end endprogram /* BLOCK 2 Parent Process Started */

The disable fork terminates all active descendants of the current process. In this case BLK1,BLK3 and BLK4 are terminated.
Wait Fork :
The wait fork statement blocks process execution flow until all immediate child subprocesses (processes created by the current process, excluding their descendants) have completed their execution.
class fork_join_class;
task run(input event ev_blk1,ev_blk4); FJ1 : fork BLK1: begin # 2ns $display( "FJ1 BLOCK 1\n" ); # 10ns; ->ev_blk1; end
BLK2: begin $display( "FJ1 BLOCK 2\n" ); end
BLK3: begin @ev_blk4; $display( "FJ1 BLOCK 3\n" ); end
BLK4: begin @ev_blk1 $display( "FJ1 BLOCK 4\n" ); ->ev_blk4; end join_any
FJ2: fork BLK1: begin # 2ns $display( "FJ2 BLOCK 1\n" ); # 10ns; ->ev_blk1; end
BLK2: begin $display( "FJ2 BLOCK 2\n" ); end
BLK3: begin @ev_blk4; $display( "FJ2 BLOCK 3\n" ); end
BLK4: begin @ev_blk1 $display( "FJ2 BLOCK 4\n" ); ->ev_blk4; end join_none
//wait fork;
endtask
endclass
program myprog; event ev_blk1,ev_blk4; fork_join_class c1 = new;
initial begin c1.run(ev_blk1,ev_blk4); P1: begin $display("Parent Process Started\n"); end
#10ns; end
endprogram
/* -- Without wait-fork FJ1 BLOCK 2
Parent Process Started
FJ2 BLOCK 2
FJ1 BLOCK 1
FJ2 BLOCK 1
-- With wait fork FJ1 BLOCK 2
FJ2 BLOCK 2
FJ1 BLOCK 1
FJ2 BLOCK 1
FJ2 BLOCK 4
FJ1 BLOCK 4
FJ2 BLOCK 3
FJ1 BLOCK 3
Parent Process Started
*/
 In the above code, FJ1 uses join_any and FJ2 uses join_none. Without wait fork construct (Line 52), BLK2 will be executed first and then P1 . Execution of other processes depend on when simulation ends. With wait fork construct(Line 52), all spawned child processes in FJ1 and FJ2 will be executed before going to P1 process.
In the above code, FJ1 uses join_any and FJ2 uses join_none. Without wait fork construct (Line 52), BLK2 will be executed first and then P1 . Execution of other processes depend on when simulation ends. With wait fork construct(Line 52), all spawned child processes in FJ1 and FJ2 will be executed before going to P1 process.